
Linear functions are the simplest algebraic functions. They have an important property which is: the sum of two linear functions is as well a linear function. Also, linear equations are the algebraic equations which are the easiest to solve. Using matrices and determinants to solve a system of equations only applies to linear equations.
A system, defined by the function f(x), is linear if the following relationship is true:
\[ \begin{split}f(x_1)&=y_1\\
f(x_2)&=y_2\\
f(x_1+x_2)&=y_1+y_2
\end{split} \]
This property is called the Superposition Principle, which can be defined as: if a system (function) responds to the input x1 with the output y1 and it responds to the input x2 with the output y2, it will respond to the sum of the inputs x1 + x2 with the sum of the outputs y1 + y2. With other words, for all linear systems, the net response caused by two or more stimuli is the sum of the responses that would have been caused by each stimulus individually.
If the inputs are variable in time, the superposition principle can be written as:
\[ \begin{split}f(x_1(t))&=y_1(t)\\
f(x_2(t))&=y_2(t)\\
f(x_1(t)+x_2(t))&=y_1(t)+y_2(t)
\end{split} \]
Based on the definition of the superposition, we can claim that:
- any system (function) which respects the principle of superposition is a linear system (function)
- the superposition principle applies to all linear systems (functions)
A system (function) is defined as linear if it satisfies the following properties::
\[ \begin{split}f(x_1+x_2) &= f(x_1)+f(x_2) \quad &\text{Additivity}\\
f(c \cdot x_1) &= c \cdot f(x_1) \quad &\text{Homogeneity}
\end{split} \]
where c is a scalar (constant).
The Additivity and Homogeneity properties together constitute the principle of superposition.
A more generic definition of the superposition principle can be written as: the response y(t) of a linear system due to multiple inputs x1(t), x2(t), … xn(t), which are acting simultaneously on the system, is equal with the sum of the responses of each individual input, when all the initial conditions of the system are zero. Therefore, if yi(t) is the system’s response (output) for the input xi(t), the following relationship is valid:
\[y(t) = \sum_{i=1}^{n}{y_{i}(t)}\]The principle of superposition can be used to solve problems in mathematics, control systems, electronics and physics. In the examples below we are going to go through each domain and solve problems using the superposition principle.
Example 1. Linear functions
A linear system is described by the function:
\[y(t)=5 \cdot x_{1}(t) + x_{2}(t)\]where the inputs x1(t) and x2(t) are defined as:
\[ \begin{split}x_{1}(t) &= t\\
x_{2}(t) &= t^2
\end{split} \]
Find the expression of y(t) function of t, using the superposition principle.
Step 1. Set x2(t) = 0 and calculate y1(t). This way we calculate only the effect of the first input.
\[ \begin{split}x_{1}(t) = t \\
x_{2}(t) = 0 \\
y(t) = y_{1}(t) = 5 \cdot t
\end{split} \]
Step 2. Set x1(t) = 0 and calculate y2(t). This way we calculate only the effect of the second input.
\[ \begin{split}x_{1}(t) = 0 \\
x_{2}(t) = t^2 \\
y(t) = y_{2}(t) = t^2
\end{split} \]
Step 3. Calculate the total output y(t) as the sum of y1(t) and y2(t).
\[y(t) = y_{1}(t) + y_{2}(t) = 5 \cdot t + t^2\]Example 2. Differential equations
In case of linear differential equations, the general solution can be found by summing up particular solutions. This is possible because a linear differential equation complies with the superposition principle.
Let’s take the following linear, 2nd order homogeneous differential equation:
\[\frac{d^2}{dx^2} y(x) + y(x) = 0 \tag{1}\]Step 1. The solutions of this type of differential equation can be guessed as:
\[ \begin{split}y_1(x) &= \cos(x) \\
y_2(x) &= \sin(x)
\end{split} \]
Step 2. Verify if the solutions are valid
The first order derivatives of the solutions, the trigonometric functions cos(x) and sin(x), are:
\[ \begin{split}\frac{d}{dx} \cos(x) &= – \sin(x) \\
\frac{d}{dx} \sin(x) &= \cos(x)
\end{split} \]
The second order derivatives of the solutions will be:
\[ \begin{split}\frac{d^2}{dx^2} \cos(x) &= – \cos(x) \\
\frac{d^2}{dx^2} \sin(x) &= – \sin(x)
\end{split} \]
If we replace the second order derivatives of the solutions and the solutions y1(x) and y2(x) in the initial differential equation (1), we’ll get:
\[ \begin{split}\cos(x) – \cos(x) &= 0\\
\sin(x) – \sin(x) &= 0
\end{split} \]
which proves that y1(x) and y2(x) are solutions for the differential equation.
Step 3. According to the principle of superposition, the general solution of the differential equation can be written as:
\[y(x) = c_1 \cos(x) + c_2 \sin(x) \tag{2}\]where c1 and c2 are scalars (constants).
Let’s prove that y(x) is in fact a general solution of the differential equation. We know that a constant factor can be taken out of a derivative and the derivative of the sum of two functions is equal to the sum of their derivatives. Applied to our general solution, it means:
\[\frac{d^2}{dx^2} y(x) = \frac{d^2}{dx^2}(c_1 \cos(x) + c_2 \sin(x)) = c_1 \frac{d^2}{dx^2} \cos(x) + c_2 \frac{d^2}{dx^2} \sin(x) = – c_1 \cos(x) – c_2 \sin(x) \tag{3}\]Replacing (2) and (3) in the initial differential equation (1), gives:
\[ \begin{split}– c_1 \cos(x) – c_2 \sin(x) + c_1 \cos(x) + c_2 \sin(x) &= 0\\
0 &= 0
\end{split} \]
which proves that (2) is a general solution of the differential equation (1).
Example 3. Control systems
A control system is linear if the superposition principle can be applied to it. Therefore, for linear systems, the response to multiple inputs can be calculated by considering one input at a time and adding the results.
Let’s consider two transfer functions, H1(s) and H2(s):
\[ \begin{split}H_1(s) &= \frac{5}{0.1 \cdot s + 1}\\
H_2(s) &= \frac{5}{0.2 \cdot s^2 + 1.2 \cdot s +1}
\end{split} \]
The two transfer functions are forming up a system which is stimulated by two inputs u1(t) and u2(t). Let’s assume that u1(t) is a step input and u2(t) is a ramp input.

Image: System with two input signals
The purpose of the exercise is to demonstrate the principle of superposition. The output y(t) is going to be calculated as the sum between y1(t) and y2(t), where:
- y1(t) is the output of the system when u1(t) is a step input and u2(t) = 0
- y2(t) is the output of the system when u1(t) = 0 and u2(t) is a ramp input
In order to simulate the our system, we are going to use an Xcos block diagram model.

Image: Transfer functions – Xcos block diagram
In section A) of the Xcos block diagram, the system is simulated with both inputs, step and ramp signals. The output y(t) is then plotted on Scope 1 together with the input signals u1(t) and u2(t). In section B) of the diagram, the input u2(t) is set to zero and only a step input is fed to the system. In section C) of the diagram, the input u1(t) is set to zero and only a ramp input is fed to the system. The outputs y1(t) and y2(2) are then plotted individually and summed together in Scope 2.
 Image: Scope 1 plot | 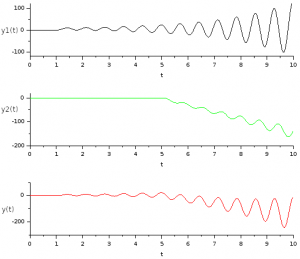 Image: Scope 2 plot |
As expected, the sum of the individual outputs y1(t) and y2(2) gives the same y(t), simulated with both inputs active. This demonstrates that the principle of superposition is valid for linear continuous systems.
Example 4. Electric circuits
Considering the electric circuit below. Find the values of the electric currents flowing through the resistors.

Image: Electrical circuit
where:
\[ \begin{split}E_1 &= 28 \text{ V}\\
E_2 &= 7 \text{ V}\\
R_1 &= 4 \text{ }\Omega\\
R_2 &= 2 \text{ }\Omega\\
R_3 &= 1 \text{ }\Omega
\end{split} \]
To solve the circuit we’ll use the principle of superposition. The strategy used is to eliminate all but one source of voltage within the circuit at a time and, using series/parallel analysis (KVL and KCL), to determine the electric current within the modified circuit for each voltage source separately. Then, once the electric currents have been determined, for each voltage source working separately, the values are all “superimposed” on top of each other (added algebraically) to find the actual currents with all voltage sources active.
Step 1. Keep only one voltage source (E1) and calculate the values of the electrical currents through the resistors.

Image: Electrical circuit – with voltage source E1
In the above circuit we have two loops, A and B and two nodes, C and D. We’ll write Kirchhoff’s Current Law (KCL) for node C and Kirchhoff’s Voltage Law (KVL) for both loops.
\[I_1 = I_2 + I_3 \tag{4}\]
\[E_1 = I_1 \cdot R_1 + I_2 \cdot R_2 \tag{5}\]
\[0 = I_2 \cdot R_2 – I_3 \cdot R_3 \tag{6}\]
We have a system of three equations from which we have to calculate the electrical currents flowing through the resistors.
Replacing (4) in (5) gives:
\[(I_2 + I_3) \cdot R_1 + I_2 \cdot R_2 = E_1 \tag{7}\]From (6) we can extract the expression of I3:
\[I_3 = \frac{I_2 \cdot R_2}{R_3} \tag{8}\]Replacing (8) in (7), gives:
\[I_2 \cdot (R_1 + R_2) + I_2 \cdot \frac{R_1 \cdot R_2}{R_3} = E_1 \tag{9}\]From (9) we can write the expression of I2 only function of the resistances and input voltage:
\[I_2 = \frac{E_1}{R_1 + R_2 + \frac{R_1 \cdot R_2}{R_3}} \tag{10}\]Replacing the numerical values of the resistances and voltage in (10), gives the value of the electrical current I2:
\[I_2 = 2 \text{ A} \tag{11}\]Replacing (11) in (8), gives the value of I3:
\[I_3 = 4 \text{ A} \tag{12}\]Replacing (11) and (12) in (4) gives the value of I1:
\[I_1 = 6 \text{ A} \tag{13}\]Step 2. Keep only one voltage source (E2) and calculate the values of the electrical currents through the resistors.

Image: Electrical circuit – with voltage source E2
In the above circuit we have two loops, A and B and two nodes, C and D. We’ll write Kirchhoff’s Current Law (KCL) for node C and Kirchhoff’s Voltage Law (KVL) for both loops.
\[I_3 = I_1 + I_2 \tag{14}\]
\[E_2 = I_3 \cdot R_3 + I_2 \cdot R_2 \tag{15}\]
\[0 = I_1 \cdot R_1 – I_2 \cdot R_2 \tag{16}\]
We have a system of three equations from which we have to calculate the electrical currents flowing through the resistors.
Replacing (14) in (15) gives:
\[(I_1 + I_2) \cdot R_3 + I_2 \cdot R_2 = E_2 \tag{17}\]From (16) we can extract the expression of I1:
\[I_1 = \frac{I_2 \cdot R_2}{R_1} \tag{18}\]Replacing (18) in (17), gives:
\[I_2 \cdot \frac{R_2 \cdot R_3}{R_1} + I_2 \cdot (R_3 + R_2) = E_2 \tag{19}\]From (19) we can write the expression of I2 only function of the resistances and input voltage:
\[I_2 = \frac{E_2}{\frac{R_2 \cdot R_3}{R_1} + R_3 + R_2} \tag{20}\]Replacing the numerical values of the resistances and voltage in (20), gives the value of the electrical current I2:
\[I_2 = 2 \text{ A} \]Replacing (21) in (18), gives the value of I1:
\[I_1 = 1 \text{ A} \]Replacing (21) and (22) in (14) gives the value of I3:
\[I_3 = 3 \text{ A} \]Step 3. Add the values of the electrical currents from Step 1 and Step 2 taking care of the sign.
\[ \begin{split}I_1 &= 6 – 1 &= 5 \text{ A}\\
I_2 &= 2 + 2 &= 4 \text{ A}\\
I_3 &= 4 – 3 &= 1 \text{ A}
\end{split} \]
In order to make sure that our calculation is correct, we are going to model the same circuit in an Xcos environment and run a simulation with both voltage sources active. The electrical currents in the Xcos simulation should match our manual calculation.

Image: Electrical circuit – Xcos bloc diagram
As expected, we have exactly the same results for the electrical current flowing through the resistors, which validates the superposition principle as a calculation method. This exercise proves that, in a linear electrical circuit (network), the voltage or current in any element resulting from several sources acting together is the sum of the voltages or currents resulting from each source acting alone.
Example 5. Electrostatic forces
Let’s assume that we have three electric charges Q1, Q2 and Q3, positioned one from another as in the image below, part A). Q1 and Q3 have positive charge while Q2 has negative charge. Assuming that the electrical charges do not interact with anything else around them, and assume that gravitational interactions are negligible, what is the magnitude and direction of the net electrostatic force on the electrical charge Q1?

Electrical charges – forces interaction
For a numerical calculation, we’ll consider the following parameters:
\[ \begin{split}Q_1 &= 1.6 \cdot 10^{-19} \text{ C}\\
Q_2 &= -3.2 \cdot 10^{-19} \text{ C}\\
Q_3 &= 4.8 \cdot 10^{-19} \text{ C}\\
L &= 0.001 \text{ m}\\
\varepsilon_0 &= 8.854187817 \cdot 10^{-12} \text{ permittivity of vacuum}\\
\varepsilon_r &= 1.00058986 \text{ (relative permittivity of air, at STP)}
\end{split} \]
In part B) of the image above, we’ve drawn the forces acting on Q1. Acting on Q1 (positive charge), there is an attraction force F21 from Q2 (negative charge) and a repulsion force F31 from Q3 (positive charge). Applying the principle of superposition, first, we can calculate the magnitude of each force individually and second, the magnitude and direction of the resultant force as a vector sum of the individual forces.
Step 1. Calculate the distance between charge Q1 and Q3.
We can observe that the charges are displayed in a right angle triangle with the legs of length L. To calculate the distance between Q1 and Q3 we need to apply the Pythagorean theorem.
\[L_{31}^2 = L_{21}^2 + L_{23}^2 \]where:
L31 [m] – distance between charge Q3 and Q1;
L21 [m] – distance between charge Q2 and Q1;
L23 [m] – distance between charge Q2 and Q3;
Solving the equation above gives L13 function of L:
\[ \begin{split}L_{31}^2 = L^2 + L^2 = 2 \cdot L^2\\
L_{31} = L \cdot \sqrt{2}
\end{split} \]
Step 2. According to Coulomb’s law the electrostatic force between two charges is calculated as:
\[F = k \cdot \frac{Q_1 \cdot Q_2}{L^2} \]where:
F [N] – Coulomb force
Q1, Q2 [C] – electrical charges
L [m] – distance between electrical charges
k [F/m] – is called the Coulomb’s constant, or electric force constant or electrostatic constant.
The value of Coulomb’s constant is calculated as:
\[k = \frac{1}{4\pi\varepsilon} \]where ε is the absolute permittivity:
\[\varepsilon =\varepsilon_0 \cdot \varepsilon_r\]Applying Coulomb’s law to both forces gives:
\[ \begin{split}F_{21} &= k \cdot \frac{Q_2 \cdot Q_1}{L_{21}^2} = -4.5989 \cdot 10^{-22} \text{ N}\\
F_{31} &= k \cdot \frac{Q_3 \cdot Q_1}{L_{31}^2} = 3.4492 \cdot 10^{-22} \text{ N}
\end{split} \]
Knowing the magnitude and direction of F31 and F21, we can determine the magnitude and direction of the resultant force F1.

Image: Electrical charge – forces
Step 3. Calculate the x-axis and y-axis components for F31 and F21.
\[ \begin{split}F_{21x} &= F_{21} &= -4.5989 \cdot 10^{-22} \text{ N}\\
F_{21y} &= 0 &= 0 \text{ N}\\
F_{31x} &= F_{31} \cdot \cos(45^{\circ}) &= 2.43895 \cdot 10^{-22} \text{ N}\\
F_{31y} &= F_{31} \cdot \sin(45^{\circ}) &= 2.43895 \cdot 10^{-22} \text{ N}
\end{split} \]
Step 4. Calculate the x-axis and y-axis components for F1.
\[ \begin{split}F_{1x} = F_{21x} + F_{31x} &= -4.5989 \cdot 10^{-22} + 2.43895 \cdot 10^{-22} &= -2.15995 \cdot 10^{-22} \text{ N}\\
F_{1y} = F_{21y} + F_{31y} &= 0 + 2.43895 \cdot 10^{-22} &= 2.43895 \cdot 10^{-22} \text{ N}
\end{split} \]
Step 5. Calculate the magnitude and direction of the resultant force F1.
We can apply the Pythagorean theorem to find the resultant force:
\[F_{1} = \sqrt{F_{1x}^2 + F_{1y}^2} = 3.25789 \cdot 10^{-22} \text{ N}\]and the definition of the tangent to find the direction, angle θ:
\[ \begin{split}\tan(\theta) &= \frac{F_{1y}}{F_{1x}}\\
\theta &= \arctan \left ( {\frac{F_{1y}}{F_{1x}}} \right ) = -41.52831^{\circ}
\end{split} \]
Conclusion: The resultant force was determined by calculating the action of each force upon charge Q1 and summing up the results. This method is an example of the application of the principle of superposition.

Image: Animation explaining the principle of superposition for electrostatic forces
Example 6. Metal bar change in length
Calculate the total change in length, in mm, of a steel bar with several linear loads (see image below).

Image: Metal bar with multiple linear loads
For the bar to be in equilibrium, the following relationship needs to be satisfied:
\[F_{1} = F_{2} + F_{3} + F_{4}\]The force and length values are as follows:
\[ \begin{split}F_{1} &= 2000 &\text{ N}\\
F_{2} &= 500 &\text{ N}\\
F_{3} &= 500 &\text{ N}\\
F_{4} &= 1000 &\text{ N}\\
L_{1} &= 0.5 &\text{ m}\\
L_{2} &= 0.25 &\text{ m}\\
L_{3} &= 0.25 &\text{ m}
\end{split} \]
We also need the cross-sectional area of the bar A and Young’s modulus of elasticity E for steel:
\[ \begin{split}A &= 0.0001 \text{ m}^2\\
E &= 2 \cdot 10^{11} \frac{\text{ N}}{m^{2}}
\end{split} \]
To solve this problem we need to use Hooke’s law, which states that tensional stiffness (tensile stress) of an uniform bar σ is linearly proportional to its fractional extension (strain) ε by the modulus of elasticity E:
\[\sigma = \epsilon \cdot E \tag{21}\]The fractional extension (strain) ε is:
\[\epsilon = \frac{\Delta L}{L} \tag{22}\]where ΔL is the change in length of the bar due to force applied and L is the load-free length of the bar.
The tensile stress σ is the ration between the force applied F and the cross-sectional area A:
\[\sigma = \frac{F}{A} \tag{23}\]Replacing (22) and (23) in (21), gives:
\[\frac{F}{A} = E \cdot \frac{\Delta L}{L} \tag{24}\]From (24) we can extract the expression of the change in length of the bar:
\[\Delta L = \frac{F \cdot L}{A \cdot E} \tag{25}\]The principle of superposition applied to this problem states that the total change in length of the bar is equal with the sum of the changes in length of the incremented sections of the bar, with individual force applied (see image below).
\[\Delta L = \Delta L_{1} + \Delta L_{2} + \Delta L_{3} \tag{26}\]")
Image: Linear forces applied to a metal bar (sections)
Step 1. Calculate the change in length of the first section
\[\Delta L_{1} = \frac{F_{2} \cdot L_{1}}{A \cdot E} = \frac{500 \cdot 0.5}{0.0001 \cdot 2 \cdot 10^{11}} = 0.00000125 \text{ m} = 0.00125 \text{ mm}\]Step 2. Calculate the change in length of the first and second section
\[\Delta L_{2} = \frac{F_{3} \cdot (L_{1} + L_{2})}{A \cdot E} = \frac{500 \cdot 0.75}{0.0001 \cdot 2 \cdot 10^{11}} = 0.000001875 \text{ m} = 0.001875 \text{ mm}\]Step 3. Calculate the change in length of the first, second and third section
\[\Delta L_{3} = \frac{F_{4} \cdot (L_{1} + L_{2} + L_{3})}{A \cdot E} = \frac{1000 \cdot 1}{0.0001 \cdot 2 \cdot 10^{11}} = 0.000005 \text{ m} = 0.005 \text{ mm}\]Step 4. Calculate the total change in length
From (26), we get:
\[\Delta L = 0.00125 + 0.001875 + 0.005 = 0.008125 \text{ mm}\]This problem is a demonstration that the principle of superposition can be used to solve complex problems with multiple loads and/or reactions acting on the member. Superposition helps us solve these problems by breaking the member down as many times as necessary for each force acting on it. Once all the stresses or deflections for the point of interest are found, they can then be added all together to get a final answer.
John
I cannot recreate example 3 control system for superposition , mux is the problem , it says problem in port size.Can you tell me what to do with this. thanks!